
|
IEC61970 17v23
|

|
|
|
IEC61970 17v23
|
|
#include <LoadMotor.h>
Public Attributes | |
| IEC61970::Base::Domain::Float | d |
| IEC61970::Base::Domain::Seconds | h |
| IEC61970::Base::Domain::Float | lfac |
| IEC61970::Base::Domain::PU | lp |
| IEC61970::Base::Domain::PU | lpp |
| IEC61970::Base::Domain::PU | ls |
| IEC61970::Base::Domain::Float | pfrac |
| IEC61970::Base::Domain::PU | ra |
| IEC61970::Base::Domain::Seconds | tbkr |
| IEC61970::Base::Domain::Seconds | tpo |
| IEC61970::Base::Domain::Seconds | tppo |
| IEC61970::Base::Domain::Seconds | tv |
| IEC61970::Base::Domain::PU | vt |
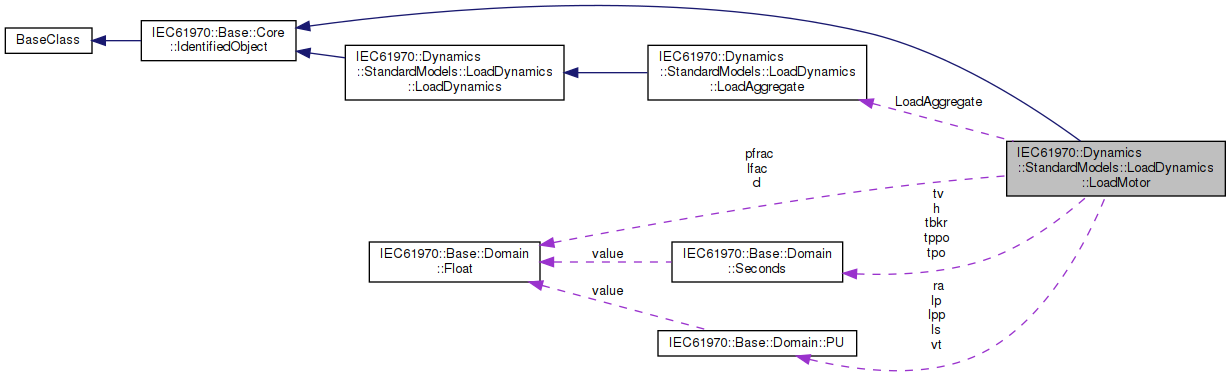
| IEC61970::Dynamics::StandardModels::LoadDynamics::LoadAggregate * | LoadAggregate |
 Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject | |
| IEC61970::Base::Domain::String | aliasName |
| IEC61970::Base::Domain::String | description |
| IEC61970::Base::Domain::String | mRID |
| IEC61970::Base::Domain::String | name |
| std::list< IEC61970::Base::DiagramLayout::DiagramObject * > | DiagramObjects |
Aggregate induction motor load. This model is used to represent a fraction of an ordinary load as "induction motor load". It allows load that is treated as ordinary constant power in power flow analysis to be represented by an induction motor in dynamic simulation. If Lpp = 0. or Lpp = Lp, or Tppo = 0., only one cage is represented. Magnetic saturation is not modelled. Either a "one-cage" or "two-cage" model of the induction machine can be modelled. Magnetic saturation is not modelled.
This model is intended for representation of aggregations of many motors dispersed through a load represented at a high voltage bus but where there is no information on the characteristics of individual motors.
This model treats a fraction of the constant power part of a load as a motor. During initialisation, the initial power drawn by the motor is set equal to Pfrac times the constant P part of the static load. The remainder of the load is left as static load.
The reactive power demand of the motor is calculated during initialisation as a function of voltage at the load bus. This reactive power demand may be less than or greater than the constant Q component of the load. If the motor's reactive demand is greater than the constant Q component of the load, the model inserts a shunt capacitor at the terminal of the motor to bring its reactive demand down to equal the constant Q reactive load. If a motor model and a static load model are both present for a load, the motor Pfrac is assumed to be subtracted from the power flow constant P load before the static load model is applied. The remainder of the load, if any, is then represented by the static load model.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::d |
Damping factor (D). Unit = delta P/delta speed. Typical Value = 2.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::h |
Inertia constant (H) (not=0). Typical Value = 0.4.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::lfac |
Loading factor – ratio of initial P to motor MVA base (Lfac). Typical Value = 0.8.
| IEC61970::Dynamics::StandardModels::LoadDynamics::LoadAggregate* IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::LoadAggregate |
Aggregate load to which this aggregate motor (dynamic) load belongs.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::lp |
Transient reactance (Lp). Typical Value = 0.15.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::lpp |
Subtransient reactance (Lpp). Typical Value = 0.15.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::ls |
Synchronous reactance (Ls). Typical Value = 3.2.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::pfrac |
Fraction of constant-power load to be represented by this motor model (Pfrac) (>=0.0 and <=1.0). Typical Value = 0.3.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::ra |
Stator resistance (Ra). Typical Value = 0.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::tbkr |
Circuit breaker operating time (Tbkr). Typical Value = 0.08.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::tpo |
Transient rotor time constant (Tpo) (not=0). Typical Value = 1.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::tppo |
Subtransient rotor time constant (Tppo). Typical Value = 0.02.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::tv |
Voltage trip pickup time (Tv). Typical Value = 0.1.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::LoadDynamics::LoadMotor::vt |
Voltage threshold for tripping (Vt). Typical Value = 0.7.
 1.8.13
1.8.13