|
CIM++ Adapted CIM_SINERGIEN Codebase
|
#include <RemoteControl.h>
Public Attributes | |
| IEC61970::Base::Domain::Float | actuatorMaximum |
| IEC61970::Base::Domain::Float | actuatorMinimum |
| IEC61970::Base::Domain::Boolean | remoteControlled |
| IEC61970::Base::Meas::Control * | Control |
 Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject | |
| IEC61970::Base::Domain::String | aliasName |
| IEC61970::Base::Domain::String | description |
| IEC61970::Base::Domain::String | mRID |
| IEC61970::Base::Domain::String | name |
| std::list< IEC61970::Base::DiagramLayout::DiagramObject * > | DiagramObjects |
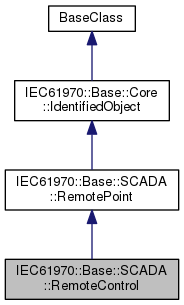
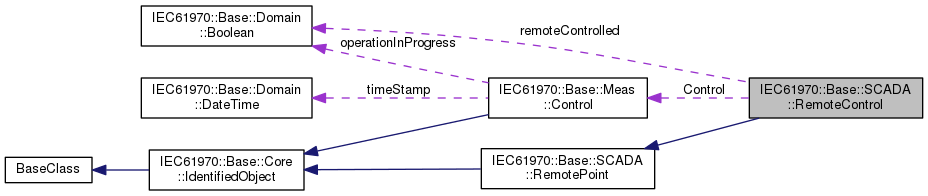
Remote controls are ouputs that are sent by the remote unit to actuators in the process.
| IEC61970::Base::Domain::Float IEC61970::Base::SCADA::RemoteControl::actuatorMaximum |
The maximum set point value accepted by the remote control point.
| IEC61970::Base::Domain::Float IEC61970::Base::SCADA::RemoteControl::actuatorMinimum |
The minimum set point value accepted by the remote control point.
| IEC61970::Base::Meas::Control* IEC61970::Base::SCADA::RemoteControl::Control |
The Control for the RemoteControl point.
| IEC61970::Base::Domain::Boolean IEC61970::Base::SCADA::RemoteControl::remoteControlled |
Set to true if the actuator is remotely controlled.
 1.8.11
1.8.11

