|
CIM++ Adapted CIM Codebase
|
#include <AsynchronousMachineUserDefined.h>

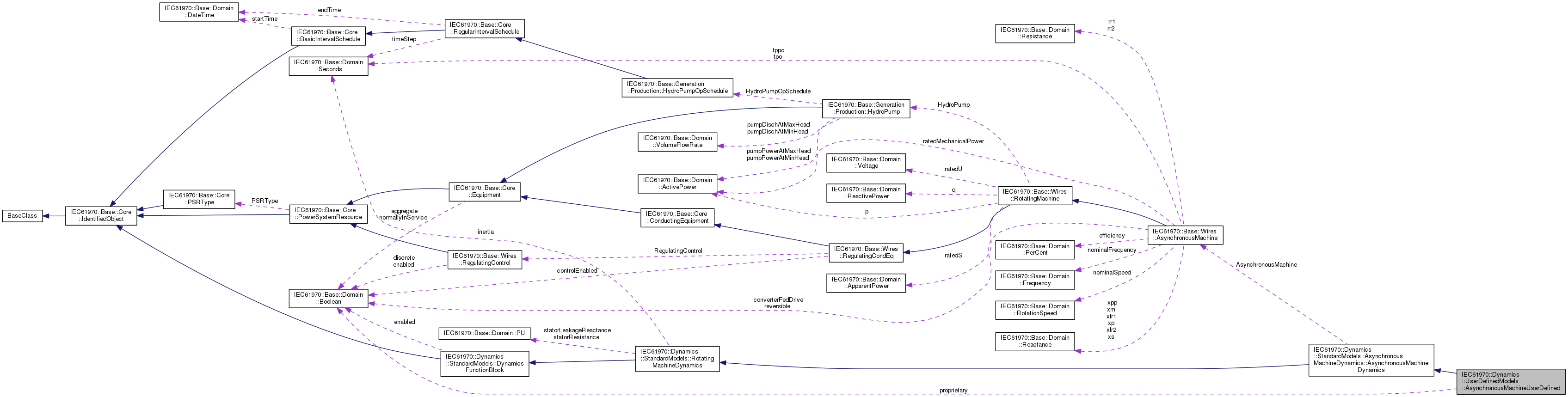
Asynchronous machine whose dynamic behaviour is described by a user-defined model.
| IEC61970::Base::Domain::Boolean IEC61970::Dynamics::UserDefinedModels::AsynchronousMachineUserDefined::proprietary |
Behaviour is based on proprietary model as opposed to detailed model. true = user-defined model is proprietary with behaviour mutually understood by sending and receiving applications and parameters passed as general attributes false = user-defined model is explicitly defined in terms of control blocks and their input and output signals.
 1.8.11
1.8.11


 Public Attributes inherited from
Public Attributes inherited from