
|
IEC61970 17v07
|

|
|
|
IEC61970 17v07
|
|
#include <WindPitchContEmulIEC.h>
Public Attributes | |
| IEC61970::Base::Domain::Float | kdroop |
| IEC61970::Base::Domain::Float | kipce |
| IEC61970::Base::Domain::PU | komegaaero |
| IEC61970::Base::Domain::Float | kppce |
| IEC61970::Base::Domain::PU | omegaref |
| IEC61970::Base::Domain::PU | pimax |
| IEC61970::Base::Domain::PU | pimin |
| IEC61970::Base::Domain::Seconds | t1 |
| IEC61970::Base::Domain::Seconds | t2 |
| IEC61970::Base::Domain::Seconds | tpe |
| IEC61970::Dynamics::StandardModels::WindDynamics::WindGenTurbineType2IEC * | WindGenTurbineType2IEC |
 Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject Public Attributes inherited from IEC61970::Base::Core::IdentifiedObject | |
| IEC61970::Base::Domain::String | aliasName |
| IEC61970::Base::Domain::String | description |
| IEC61970::Base::Domain::String | mRID |
| IEC61970::Base::Domain::String | name |
| std::list< IEC61970::Base::DiagramLayout::DiagramObject * > | DiagramObjects |
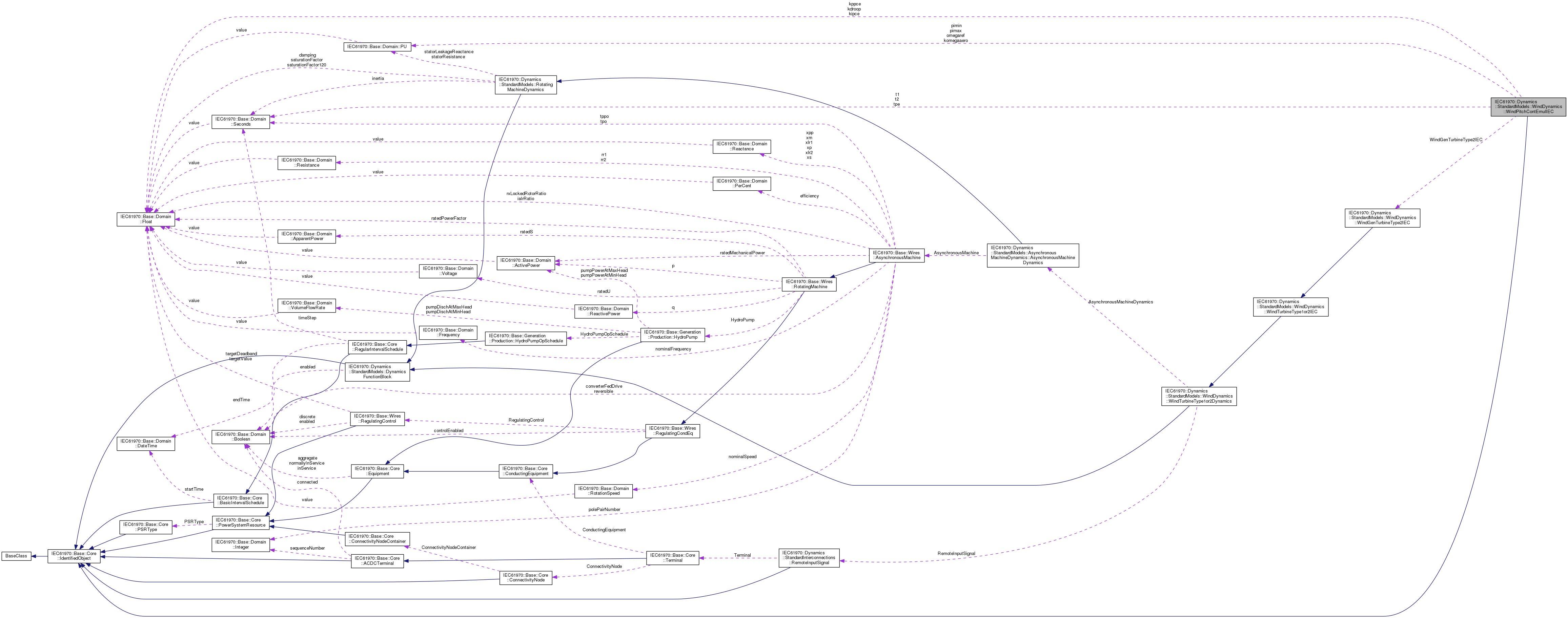
Pitch control emulator model.
Reference: IEC Standard 61400-27-1 Section 6.6.5.1.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::kdroop |
Power error gain (Kdroop). It is case dependent parameter.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::kipce |
Pitch control emulator integral constant (KI,pce). It is type dependent parameter.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::komegaaero |
Aerodynamic power change vs. omegaWTR change (Komegaaero). It is case dependent parameter.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::kppce |
Pitch control emulator proportional constant (KP,pce). It is type dependent parameter.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::omegaref |
Rotor speed in initial steady state (omegaref). It is case dependent parameter.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::pimax |
Maximum steady state power (pimax). It is case dependent parameter.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::pimin |
Minimum steady state power (pimin). It is case dependent parameter.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::t1 |
First time constant in pitch control lag (T1). It is type dependent parameter.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::t2 |
Second time constant in pitch control lag (T2). It is type dependent parameter.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::tpe |
Time constant in generator air gap power lag (Tpe). It is type dependent parameter.
| IEC61970::Dynamics::StandardModels::WindDynamics::WindGenTurbineType2IEC* IEC61970::Dynamics::StandardModels::WindDynamics::WindPitchContEmulIEC::WindGenTurbineType2IEC |
Wind turbine type 2 model with which this Pitch control emulator model is associated.
 1.8.13
1.8.13