
|
IEC61970 17v07
|

|
|
|
IEC61970 17v07
|
|
#include <GovHydroPID.h>

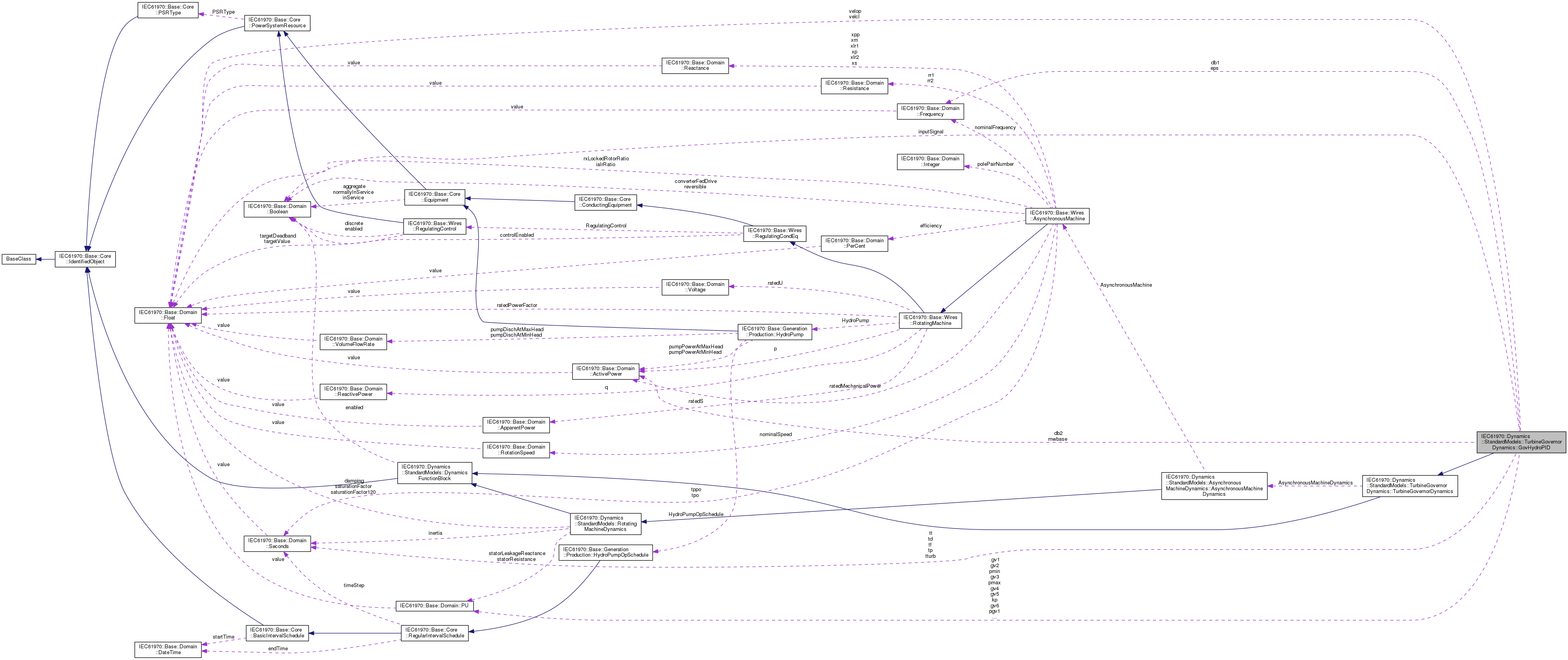
PID governor and turbine.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::aturb |
Turbine numerator multiplier (Aturb) (note 3). Typical Value -1.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::bturb |
Turbine denominator multiplier (Bturb) (note 3). Typical Value = 0.5.
| IEC61970::Base::Domain::Frequency IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::db1 |
Intentional dead-band width (db1). Unit = Hz. Typical Value = 0.
| IEC61970::Base::Domain::ActivePower IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::db2 |
Unintentional dead-band (db2). Unit = MW. Typical Value = 0.
| IEC61970::Base::Domain::Frequency IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::eps |
Intentional db hysteresis (eps). Unit = Hz. Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv1 |
Nonlinear gain point 1, PU gv (Gv1). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv2 |
Nonlinear gain point 2, PU gv (Gv2). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv3 |
Nonlinear gain point 3, PU gv (Gv3). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv4 |
Nonlinear gain point 4, PU gv (Gv4). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv5 |
Nonlinear gain point 5, PU gv (Gv5). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::gv6 |
Nonlinear gain point 6, PU gv (Gv6). Typical Value = 0.
| IEC61970::Base::Domain::Boolean IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::inputSignal |
Input signal switch (Flag). true = Pe input is used false = feedback is received from CV. Flag is normally dependent on Tt. If Tf is zero, Flag is set to false. If Tf is not zero, Flag is set to true. Typical Value = true.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::kd |
Derivative gain (Kd). Typical Value = 1.11.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::kg |
Gate servo gain (Kg). Typical Value = 2.5.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::ki |
Integral gain (Ki). Typical Value = 0.36.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::kp |
Proportional gain (Kp). Typical Value = 0.1.
| IEC61970::Base::Domain::ActivePower IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::mwbase |
Base for power values (MWbase) (>0). Unit = MW.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv1 |
Nonlinear gain point 1, PU power (Pgv1). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv2 |
Nonlinear gain point 2, PU power (Pgv2). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv3 |
Nonlinear gain point 3, PU power (Pgv3). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv4 |
Nonlinear gain point 4, PU power (Pgv4). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv5 |
Nonlinear gain point 5, PU power (Pgv5). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pgv6 |
Nonlinear gain point 6, PU power (Pgv6). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pmax |
Maximum gate opening, PU of MWbase (Pmax). Typical Value = 1.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::pmin |
Minimum gate opening, PU of MWbase (Pmin). Typical Value = 0.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::r |
Steady state droop (R). Typical Value = 0.05.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::td |
Input filter time constant (Td). Typical Value = 0.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::tf |
Washout time constant (Tf). Typical Value = 0.1.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::tp |
Gate servo time constant (Tp). Typical Value = 0.35.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::tt |
Power feedback time constant (Tt). Typical Value = 0.02.
| IEC61970::Base::Domain::Seconds IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::tturb |
Turbine time constant (Tturb) (note 3). Typical Value = 0.8.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::velcl |
Maximum gate closing velocity (Velcl). Unit = PU/sec. Typical Value = -0.14.
| IEC61970::Base::Domain::Float IEC61970::Dynamics::StandardModels::TurbineGovernorDynamics::GovHydroPID::velop |
Maximum gate opening velocity (Velop). Unit = PU/sec. Typical Value = 0.09.
 1.8.13
1.8.13
 Public Attributes inherited from
Public Attributes inherited from