
|
IEC61970 17v07
|

|
|
|
IEC61970 17v07
|
|
#include <AsynchronousMachineEquivalentCircuit.h>

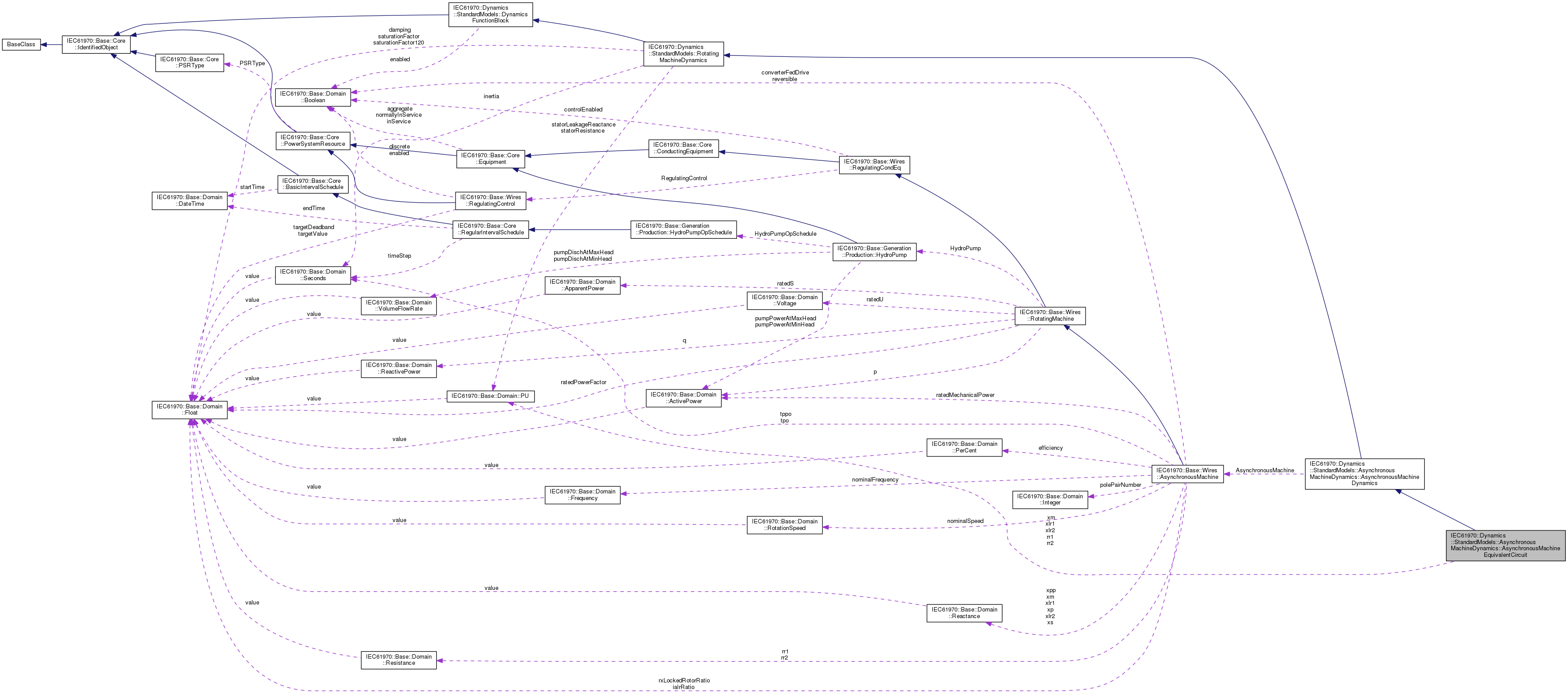
The electrical equations of all variations of the asynchronous model are based on the AsynchronousEquivalentCircuit diagram for the direct and quadrature axes, with two equivalent rotor windings in each axis.
Equations for conversion between Equivalent Circuit and Time Constant Reactance forms: Xs = Xm + Xl X' = Xl + Xm * Xlr1 / (Xm + Xlr1) X'' = Xl + Xm * Xlr1* Xlr2 / (Xm * Xlr1 + Xm * Xlr2 + Xlr1 * Xlr2) T'o = (Xm + Xlr1) / (omega0 * Rr1) T''o = (Xm * Xlr1 + Xm * Xlr2 + Xlr1
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::AsynchronousMachineDynamics::AsynchronousMachineEquivalentCircuit::rr1 |
Damper 1 winding resistance.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::AsynchronousMachineDynamics::AsynchronousMachineEquivalentCircuit::rr2 |
Damper 2 winding resistance.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::AsynchronousMachineDynamics::AsynchronousMachineEquivalentCircuit::xlr1 |
Damper 1 winding leakage reactance.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::AsynchronousMachineDynamics::AsynchronousMachineEquivalentCircuit::xlr2 |
Damper 2 winding leakage reactance.
| IEC61970::Base::Domain::PU IEC61970::Dynamics::StandardModels::AsynchronousMachineDynamics::AsynchronousMachineEquivalentCircuit::xm |
Magnetizing reactance.
 1.8.13
1.8.13
 Public Attributes inherited from
Public Attributes inherited from